4.2.1 入门动态规划
用状态图来分析问题
这部分从一个简单的例子出发,重点感受下借助状态图来分析和求解问题的思路。
题目:爬楼梯。每次可以爬 1 或 2 个台阶,现在有 n 个台阶,请问有多少种不同的走法?
两个思路:
一步一步走(1 或 2 阶),直到走到 n 个台阶
先走一步(1 或 2 阶),再走剩余的台阶,直到剩余 0
思路一
方案:依次确定每步
思路一是依次确定每一步该怎么走,如下:
第 1 步:可以走 [1] 或 [2]
第 2 步:可以走 [1] 或 [2]
第 3 步:可以走 [1] 或 [2]
...
第 i 步:可以走 [1] 或 [2]
...
直到走的台阶数达到 n 个。
以 n=7 为例,方案如下:
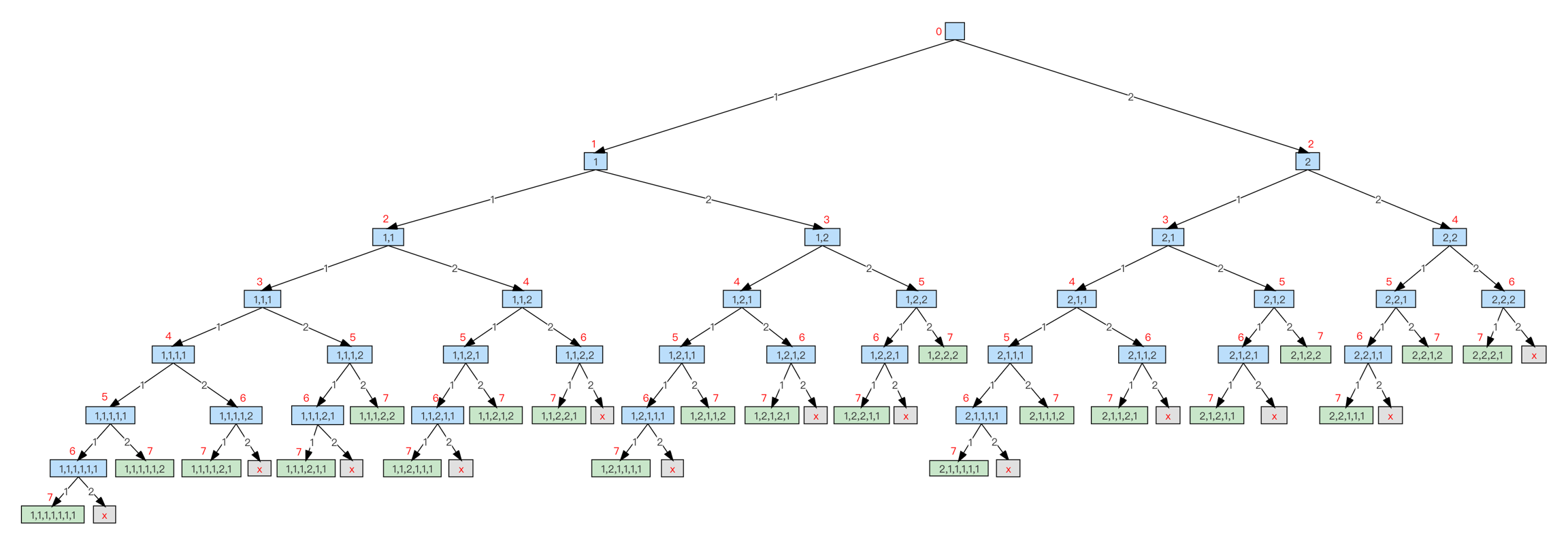
其中,蓝框里是具体的走法,红色数字表示当前走过的台阶总数,绿框是达到 n=7 这一目标了,是叶子结点。
这棵状态树,形式上和《4.1 递归》中介绍的排列模板类似——“依次考虑每个位置放哪个数字”,所以就直接写递归代码了,如下:
运行结果:超出时间限制 最后执行的输入:44
很不幸,超时了。说明代码运行太慢了,来看看怎么优化。
优化:合并相同状态
这个思路是依次确定第 i 步怎么走,类似于“排列”。虽然是排列的思路,但代码里没记录具体的走法,只记录了当前走过的台阶总数,所以真实的状态图如下,其中蓝框和绿框里的数字就是“当前走过的台阶总数”。
我们可以很直观地看到有很多重复的状态。将相同的状态合并了之后,状态图就从一棵树“变”成了一个有向无环图,其实说“变”是不合适的,因为树本来就是特殊的图。有向无环图如下:
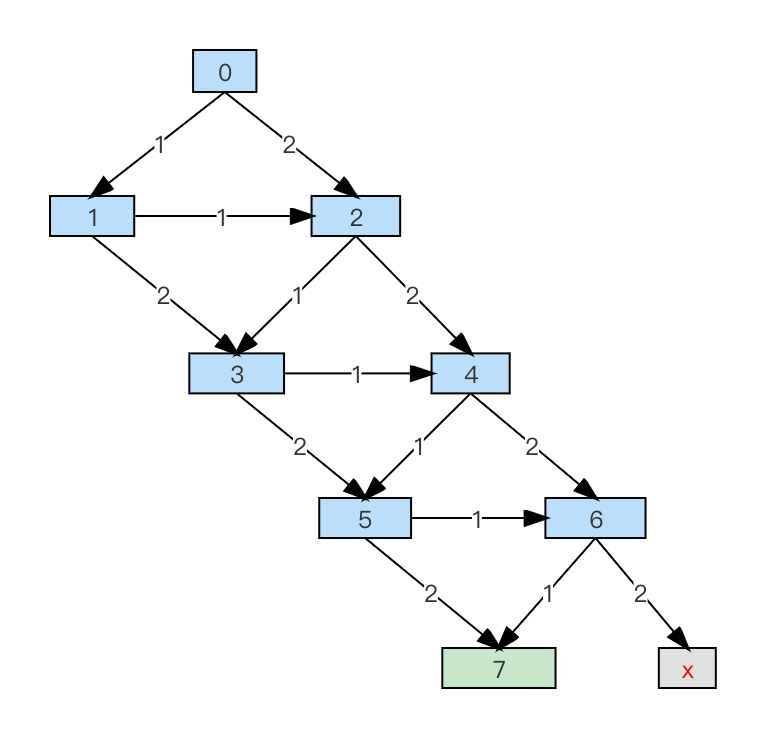
现在,我们试着遍历下这个有向无环图,思路依然是依次确定第 i 步怎么走。
广度优先遍历,代码如下:
执行结果:超出时间限制 最后执行的输入:35
呃...依然超时,而且效果似乎更差了。为什么?
思考:状态树 vs 状态图
虽然相同的状态是被合并了,但是代码还是遍历了每条边每个点,因为该思路的本质是“排列”,排列的每一步都是独立且彼此依赖的,其整体才是最终答案。这就意味着即便是同一个结点,但因为达到它或是从它出发的边不同,致使它们依然是彼此不重叠的。
也就是说,这段广度优先遍历图的代码,和上面的深度优先遍历树的代码是一样的。代码之所以要遍历从 0-n 的每条路径,而没有使用布尔数组 visited[] 来避免相同结点的重复访问,就是因为它是通过统计具体的走法来计算总数的。
提问:题目里只要求计算有多少种走法,并没有要求列出每种走法的具体步骤,那么能否通过记录每个结点的“走法总数”,从而避免重复遍历图中的每个结点呢?
答案是肯定的,这其实就是我们的思路二。
思路二
方案:划分子问题
思路二是通过先走一步,从而将 n 阶的问题,划分成
先走 1 阶,再走 n-1 阶
先走 2 阶,再走 n-2 阶
这两个规模更小的子问题。其本质是分治。
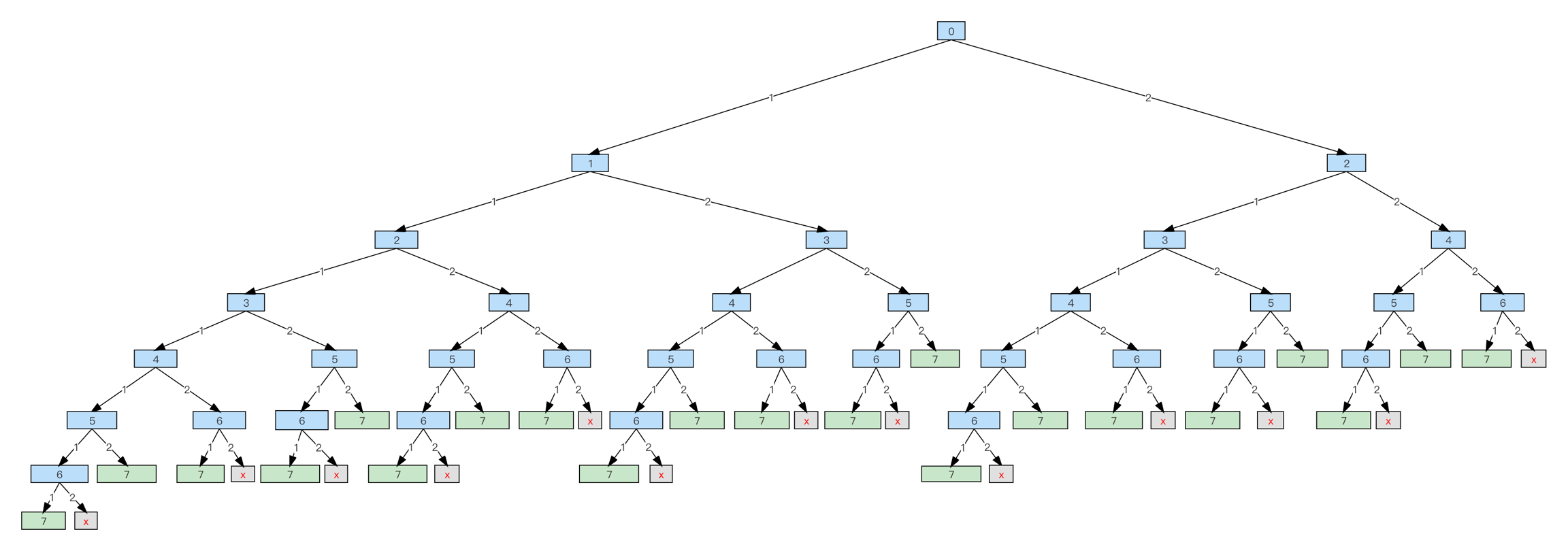
继续以 n=7 为例,方案如下:
同样,将树中的相同状态合并下,就变成了一张图,如下:
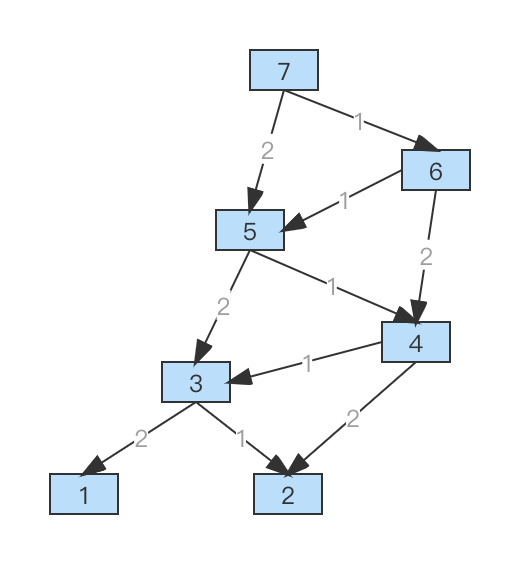
欸,合并后的图看起来和思路一的好像啊。这里我们对照着看下,下图中的左侧是思路二、右侧是思路一。它俩之所以看起来相似(一个倒着长一个正着长),是因为图里都隐藏了第二个状态,它们完整的状态都是个二元组,分别是 [台阶数, 走法总数]、[台阶数, 具体走法]。现在再从状态组的视角看它们,还是有本质不同的。
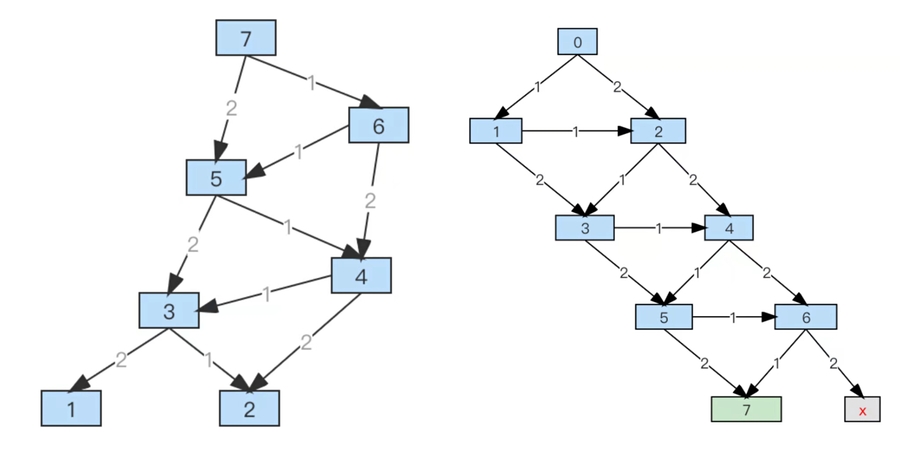
好,我们继续回到思路二(上图左一)。它是把 n 阶的问题划分成了 n-1 和 n-2 这两个子问题,如果用函数的形式 f(n) 表示 n 个台阶的走法总数,那么图中每个结点所对应的状态就是 [n, f(n)],由它出发的两条边的含义就是 f(n) = f(n-1) + f(n-2)。
啊哈,这不就是斐波那契数列吗?那简单,递归实现,代码如下:
运行结果:超出时间限制 最后执行的输入:45
囧,还是超时。
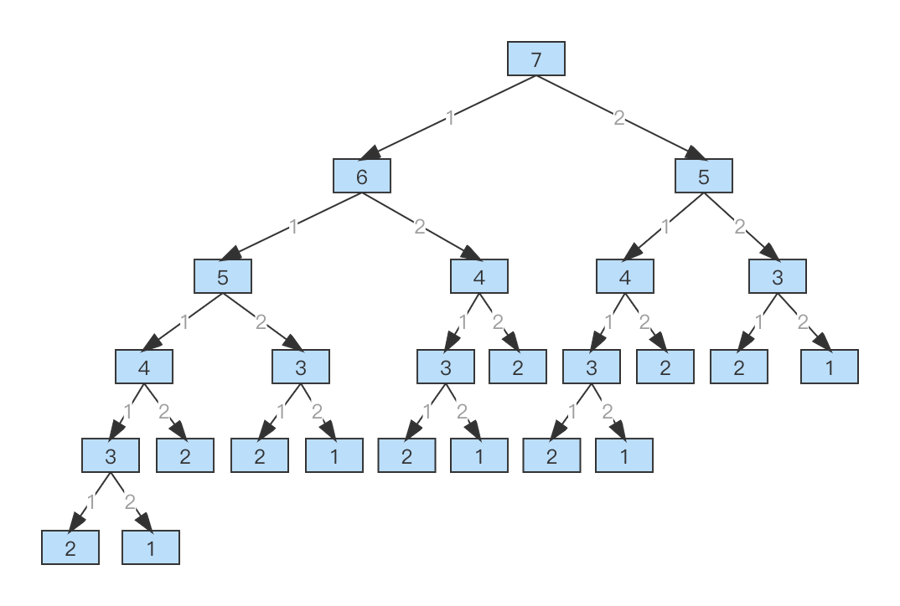
通过打印 log,可以看到代码都递归了谁。继续以 n=7 为例,如下:
我们发现递归了很多重复的 n,比如 n=5 两次,n=4 三次,n=3 五次,n=2 八次,n=1 五次。
优化:记忆化搜索
思考:能否把计算过的结果给存起来,等下次再递归到此 n 时就不用再继续向下探寻(递归)了?
当然可以。改造后的代码,如下:
执行结果:通过
此时再运行 climbStairs(7),递归的日志如下。计算的状态数明显少了,从指数阶 O(2n) 降到了线性阶 O(n)。
这种将之前计算过的状态 [n, f(n)] 先存起来的解决方法,就是记忆化搜索,它能有效避免递归的重复下探,从而提高执行效率。大家是否有注意到,上述代码中用来存储状态的数据结构 cache[] 和我们遍历图时为了防止结点的重复访问而使用的布尔数组 visited[] 有异曲同工之妙,都是为了避免不必要的遍历(广度优先遍历的代码详见末尾的附录 B)。
优化:消除递归
还有一种可以有效避免递归重复下探的方法,那就是消除递归。对,就是不用递归实现了,改用 for 循环,代码如下:
从小到大的迭代,就天然地避免了状态的重复,因为它是纯纯的递推,而不像递归那样,先层层向下探寻(这步有可能出现“重复”),再层层向上递推。
你是否能想象的到,刚才写的 for 循环代码就是动态规划算法。
我们可以说把带记忆的递归搜索展开成 for 循环就是动态规划,也可以说记忆化搜索就是动态规划的递归实现,但它们都是表象。最根本的还是在于状态空间,就拿爬楼梯的例子来说,状态是个二元组 [n, f(n)],状态转移方程是 f(n) = f(n-1) + f(n-2)。
记忆化搜索依托的是图,图中的结点对应的完整状态是 [n, f(n)],图中的边的含义是 f(n) = f(n-1) + f(n-2)。而动态规划依托的是迭代——从小到大的迭代,至于如何确定迭代的递推公式,我们后面的文章会详细介绍。
总结
本文作为动态规划的入门,并没有对它进行过多的介绍,而是仅在末尾引出了动态规划。虽说如此,其实文章里的很多内容都和动态规划有着千丝万缕的联系。
比如我们常说,先暴力搜索,如果太慢就动态规划,如果还慢就贪心。那暴力搜索为什么慢?还记得上面的树形状态图吗?如下,树每长高一层就会多 2k 个状态,如果是 3 叉树或 4 叉树就会多 3k 或 4k 个状态。总之,状态空间是呈指数级增长的,诸如 2n, 3n ... 10n 等,这就是暴力搜索慢的根本原因。
即便是形态从树变成了图,依然可能是指数级增长的。还记得思路一(右)和思路二(左)的对比吗?只不过指数级增长从眼花缭乱的树结点个数,变成了图中边的个数的累乘。
状态图的“图”形结构也只是个表象,重点还是在于图中的边是如何迁移的、图中的结点是如何诠释该问题的。
暴力搜索想要升级成记忆化搜索,关键还是在于分治,即将原问题划分成“规模更小但解题思路一致”的子问题。只有在这样的状态空间里,才有可能(自然而然地)出现重叠的(子)状态,而它就是我们要记忆化的对象。
记忆化搜索本质上就是动态规划的递归实现。而我们常说的动态规划算法,大多数时候都是用 for 循环来实现的,因为它的代码更短小更简洁。正是因为它的简洁,以至于我们在代码里往往只看到了几层 for 循环和一个递推公式,就莫名其妙地把一个看起来还挺复杂的问题给解决了,其实它背后蕴藏着对状态空间的分析和改造。而本文的主要目的,就是学会借助状态图来分析和求解问题。
附录 A
最后的动态规划代码还可以进一步优化,将空间复杂度从 O(n) 降为 O(1)。代码如下:
附录 B
记忆化搜索也可以用广度优先遍历实现,代码如下:
Last updated